明日の設計図
たまにロボットを考えるブログ・・・。
ja
2019-07-15T15:13:25+09:00
-
bluetooth ドライバを入れて イヤホンを使う
ソニーのSBH82Dという、オープンイヤーワイヤレスヘッドステレオヘッドセットを使うために苦労したのでブログにします。
PCはbluetooth内臓のthinkpadです。win7 SP1です。
○できない様子
・イヤホンをペアリングモードにする
・bluetoothデバイスの追加からSBH...
インテル@・・・・
いろいろと
2019-07-15T15:13:25+09:00
Adel
NINJA BLOG
Adel
-
テンプレを変えた
テンプレを変更しました。
古いテンプレは画面の横長についていけないので...
日誌
2019-02-17T20:19:10+09:00
Adel
NINJA BLOG
Adel
-
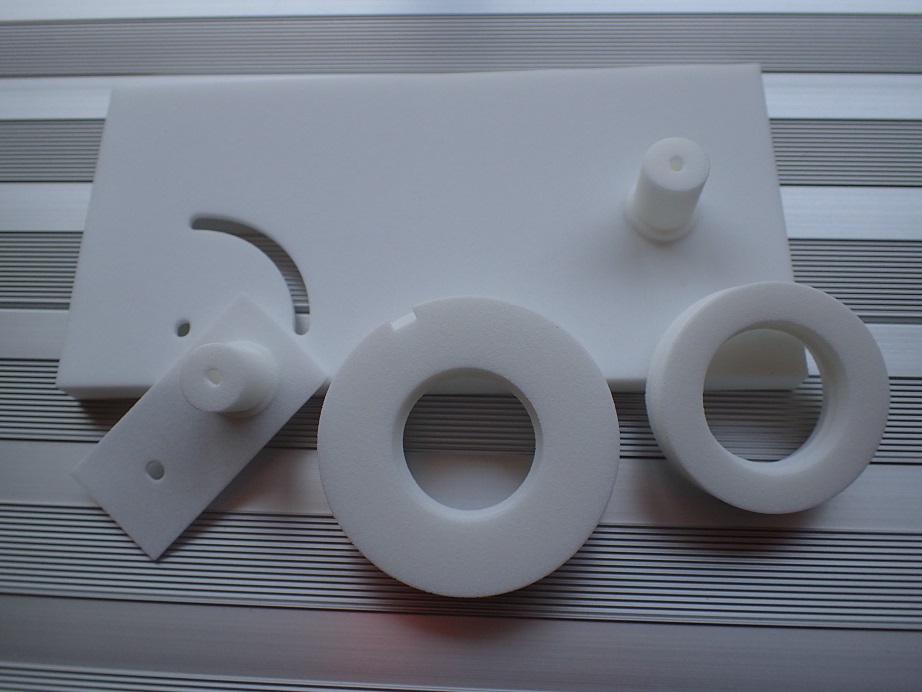
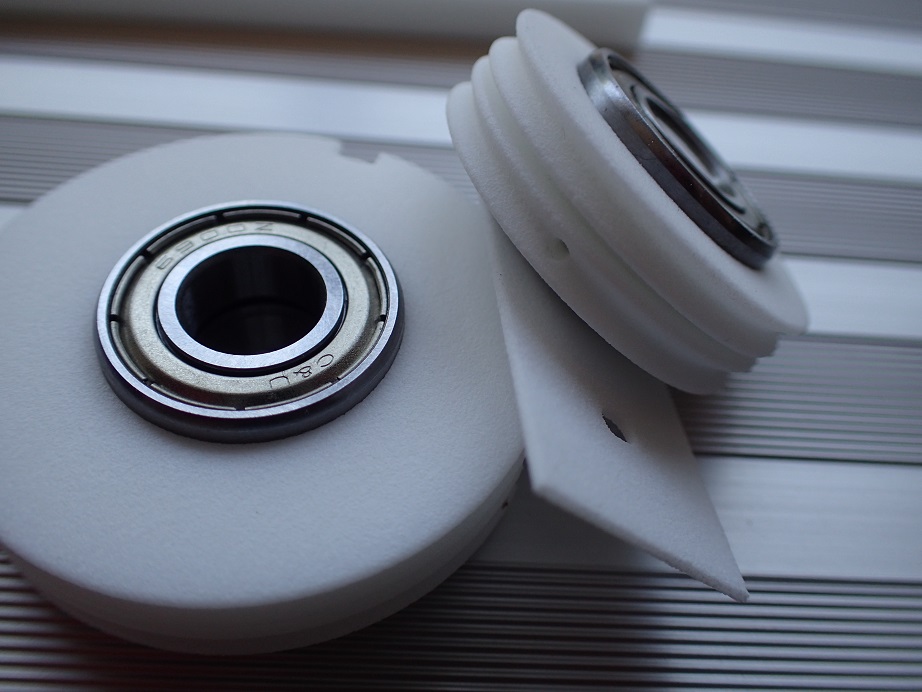
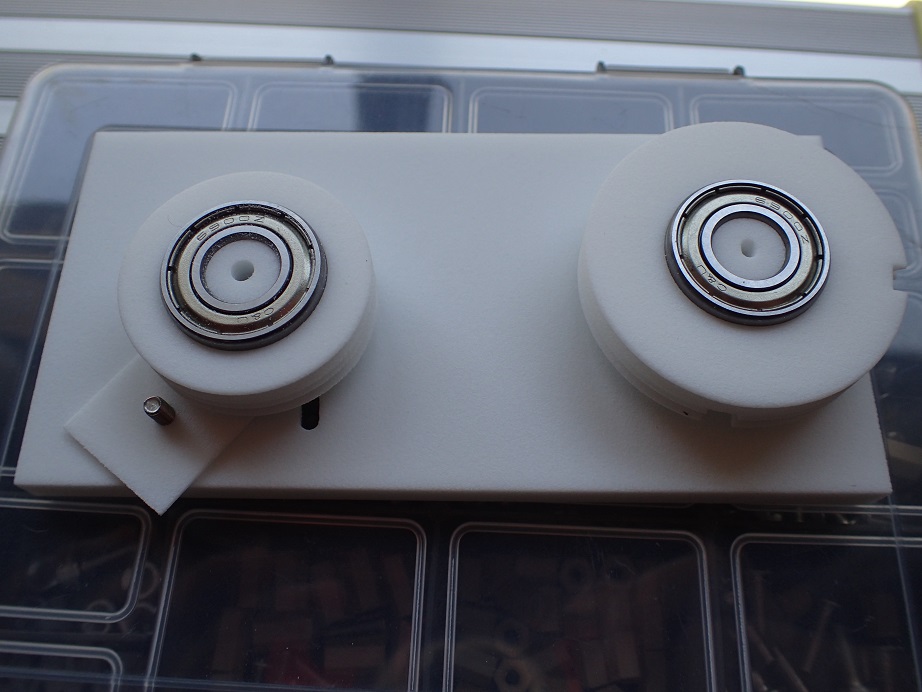
有限角度のノンバックラッシプーリ伝達
簡単な部品でノンバックラッシ伝達ができないかと思ってチャレンジしました。
2本のテグス間にテンションをかけます。
小プーリで270deg動きます。
忘備録
回転の伝達なので、歯車かプーリかの2択です。
バックラッシのない歯車は超激レアなので重課金です。
タイミングベルトでプーリも面倒です。...
2本のテグス間にテンションをかけます。
いろいろと
2017-05-28T17:55:29+09:00
Adel
NINJA BLOG
Adel
-
実行ファイルにドラッグアンドドロップする。
忘備録
Cでテキストファイルを処理したいとき、アドレスのパスをどうやって渡すかいつも面倒だと思っていました。
で、よく考えると実行形式のファイルに乗っけて起動するタイプのソフトってありますよね。
だからそういうのできるんだと思ってググりました。
http://achapi2718.blogs...
http://achapi2718.blogspot.jp/2012/06/c_1002.html
いろいろと
2017-04-25T10:50:00+09:00
Adel
NINJA BLOG
Adel
-
pythonはじめました
超素人が、pythonでGUI開発を軌道に乗せるまで備忘録
①いろいろググるとanacondaをインストールすることになります。
https://www.continuum.io/downloads
windows版の32bitを10分ぐらいでダウンロードして、
実行して
30分弱ぐらいのイン...
① https://www.continuum.io/downloads ② いろいろインストールされて、何をやればいいのか分からなくなります。http://pythondatascience.plavox.info/python%E3%81%AE%E9%96%8B%E7%99%BA%E7%92%B0%E5%A2%83/jupyter-notebook%E3%82%92%E4%BD%BF%E3%81%A3%E3%81%A6%E3%81%BF%E3%82%88%E3%81%86/ ③ pythonのコードを書いて、shift enterします。④ GUIをします。http://d.hatena.ne.jp/mFumi/20141112/1415806010 ⑤ エクストラステージhttp://stackoverflow.com/questions/40094086/python-kernel-dies-for-second-run-of-pyqt5-gui
python
2017-02-19T14:52:35+09:00
Adel
NINJA BLOG
Adel
-
ルンゲクッタ法で微分方程式(単振動)を積分
創生×⇒創成○
だそうです。
大きな問題ですね。
シミュレーションに迫られておりまして、非線形微分方程式を積分したくなっております。
解析解は出ませんどころか、点群データなわけで。
シミュレーションに迫られて います。
5年前にこのブログでもルンゲクッタ法にふれていま...
参考サイト様 ダウンロード
いろいろと
2016-08-16T19:41:06+09:00
Adel
NINJA BLOG
Adel
-
歯車創生2
歯車どうやって作るシリーズ再開です。
ぜんかい、図形を少しずつずらしていくと曲線が見えてくる⇒これが歯だ
という展開でしたが、ではその曲線そのものはどんな関数としてあらわされるのか?
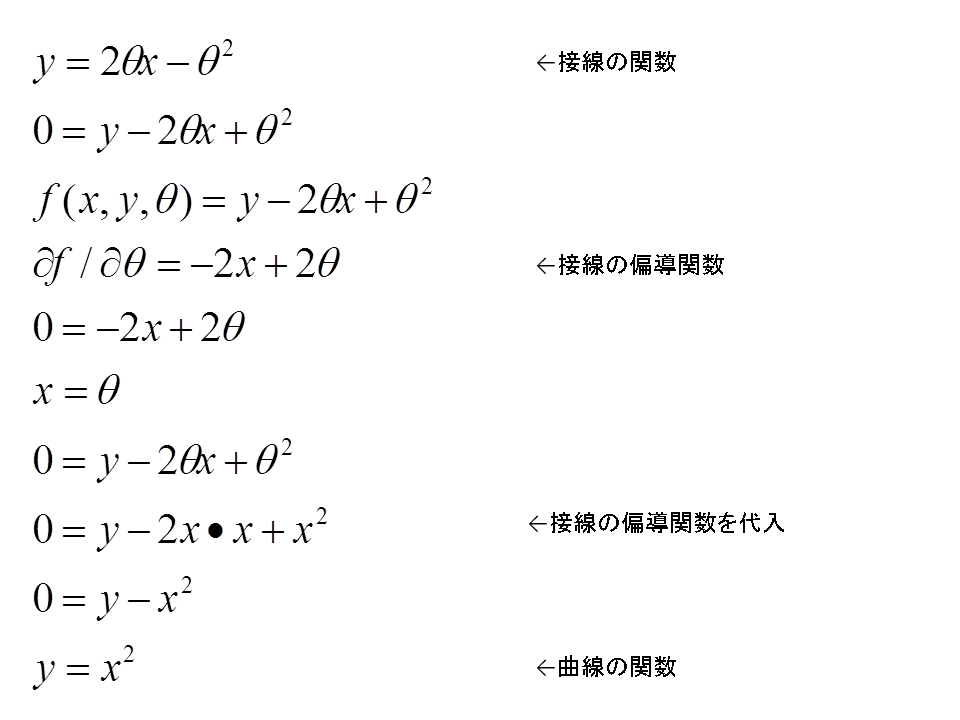
で、ネットサーフィンの果てに"包絡線"というものを見つけました。
参考サイト様http://hoo...
http://hooktail.sub.jp/mathInPhys/envelope/
いろいろと
2016-05-03T00:24:44+09:00
Adel
NINJA BLOG
Adel
-
歯車創生1
★ロボットを作っていくうえでギアが必要ですが、ギアはどうやって作るんでしょう?
・そもそも歯の形状って何なの。
・インヴォリュートってなんなの。
・なんでうまくかみ合うの。
などなどいろんな不思議と戦う必要があります。
かなり世の中は不思議でいっぱいです。
ググってみると加工法は分かります。...
いろいろと
2016-02-20T17:04:00+09:00
Adel
NINJA BLOG
Adel
-
mbed備忘録7:KONDOシリアルサーボはじめました
ジャイロを買って、サーボも買って、mbedもかって・・・
シリアル用の回路つけてなんにもしてない日々が流れていたので、ちょっとあそびました。
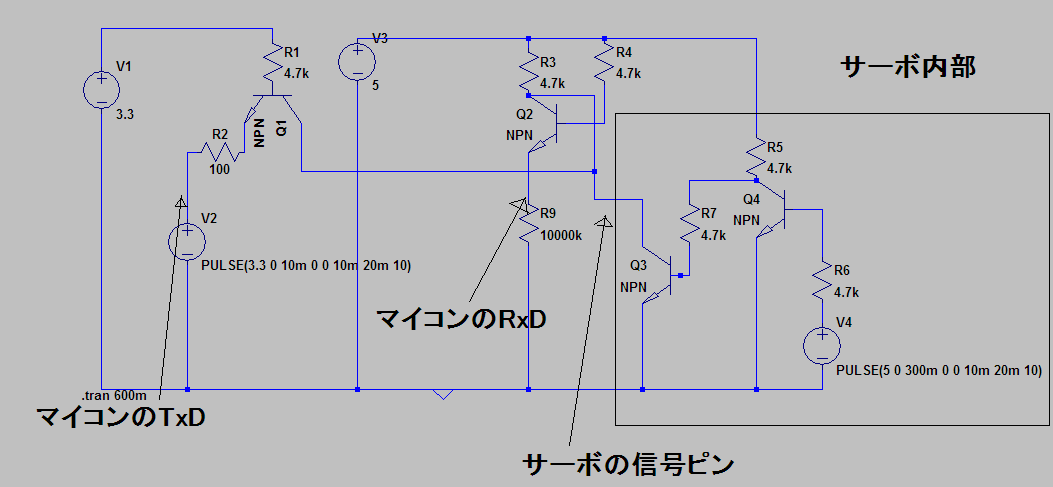
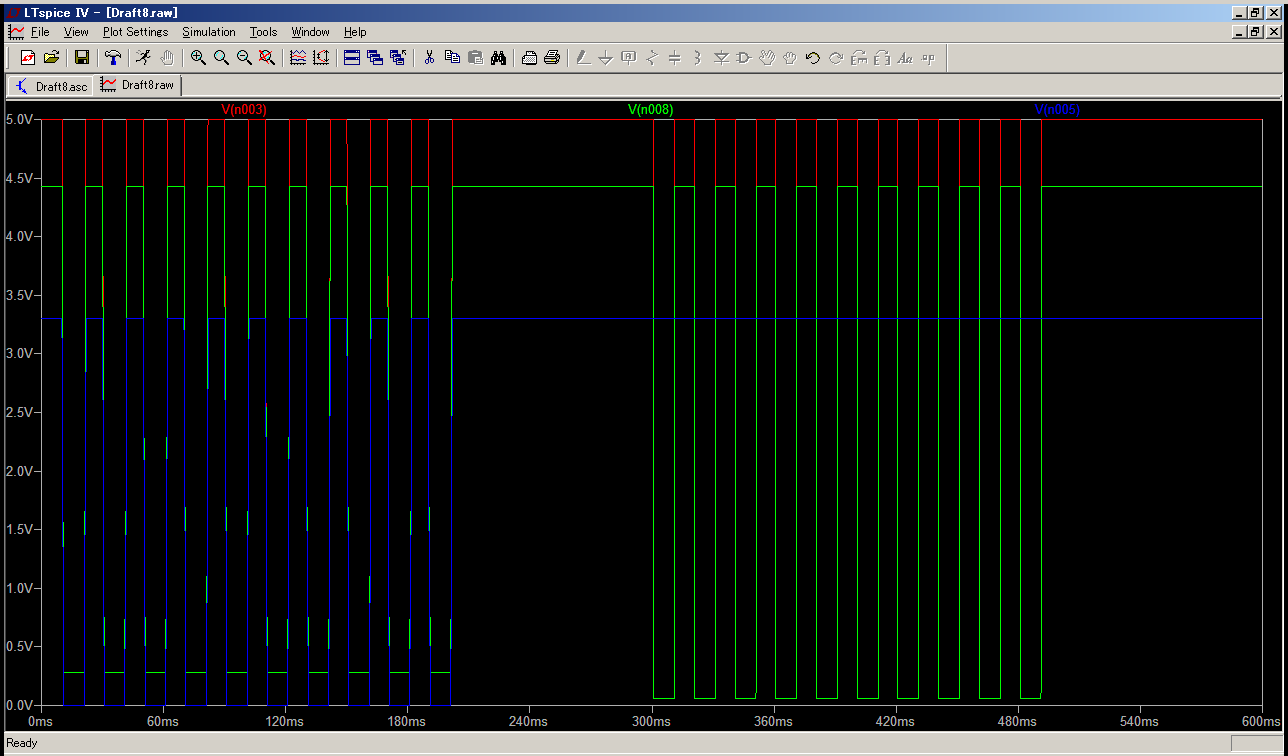
◆まずはじめに、近藤の半2重通信をmbedにどうつなぐかです。
回路図はこんな感じ
mbedからの信号を5Vにしつつ半2重通信をします。
なぜそういうこと...
コマンド方式サーボKRS-6003HVの制御 その1 Serial ko(p9,p10);//txrx void setServoDeg(float deg)//+-135deg { deg=deg+135; if(deg>270)deg=270; if(deg<0)deg=0; targetPosi = 3500 + (int)((deg*800)/27); } float getServoDeg(void) { return (((float)(feedbackPosi-3500)*27)/800)-135; } /*----------------------------------*/ /* KONDOと角度 */ /*----------------------------------*/ int set_posi(char id, int pos) { unsigned char tx[3]; unsigned char rx[6]; int i; int data=0; tx[0] = 0x80 | id; tx[1] = (unsigned char)( (pos >> 7) & 0x7f); tx[2] = (unsigned char)(pos &0x7f); for(i = 0; i<3; i++){ ko.putc(tx[i]); } //wait(16); for(i = 0; i<6; i++){ rx[i] = ko.getc(); } data = (int)(rx[4] & 0x7f); data = (data << 7) + (int)(rx[5] & 0x7f); return data; } int main(){ ko.baud(115200); ko.format(8, Serial::Even, 1); setServoDeg(もくひょうかくど); feedbackPosi=set_posi(1, targetPosi); VIDEO 簡単なデジタルフィルタの実装 // それぞれの変数は下記のとおりとする // float samplerate … サンプリング周波数 // float freq … カットオフ周波数 // float q … フィルタのQ値 float omega,alpha,a0,a1,a2,b0,b1,b2; float freq=.01; float q=0.7071; float samplerate=200; /*----------------------------------*/ /* ハイパスフィルターセット */ /* Data入力 */ /*----------------------------------*/ void setHPF(void) { omega = 2.0 * 3.14159 * freq/samplerate; alpha = sin(omega) / (2.0* q); a0 = 1.0 + alpha; a1 = -2.0 * cos(omega); a2 = 1.0 - alpha; b0 = (1.0 + cos(omega)) / 2.0; b1 = -(1.0 + cos(omega)); b2 = (1.0 + cos(omega)) / 2.0; } float in1=0,in2=0,out1=0,out2=0; /*----------------------------------*/ /* ハイパスフィルタ出力 */ /* Data入力 */ /*----------------------------------*/ float outHPF(float input) { // それぞれの変数は下記のとおりとする // float input[] …入力信号の格納されたバッファ。 // flaot output[] …フィルタ処理した値を書き出す出力信号のバッファ。 // int size …入力信号・出力信号のバッファのサイズ。 // float in1, in2, out1, out2 …フィルタ計算用のバッファ変数。初期値は0。 // float a0, a1, a2, b0, b1, b2 …フィルタの係数。 別途算出する。 // 入力信号にフィルタを適用し、出力信号として書き出す。 float output; output = b0/a0 * input + b1/a0 * in1 + b2/a0 * in2 - a1/a0 * out1 - a2/a0 * out2; in2 = in1; // 2つ前の入力信号を更新 in1 = input; // 1つ前の入力信号を更新 out2 = out1; // 2つ前の出力信号を更新 out1 = output; // 1つ前の出力信号を更新 return out1; }
mbed
2015-11-08T18:27:11+09:00
Adel
NINJA BLOG
Adel
-
4自由度ヘビの軌道生成?③
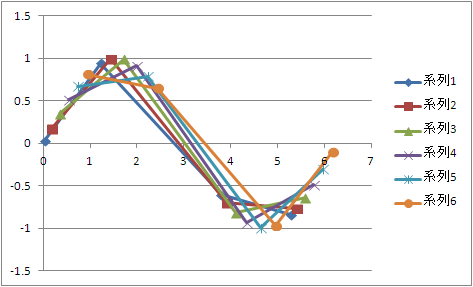
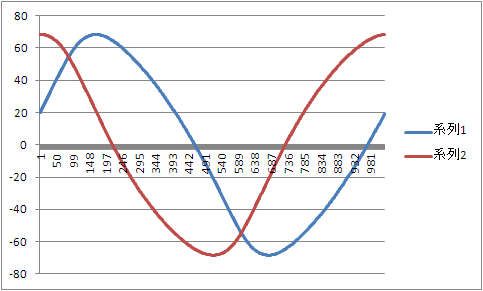
軌道上を通った場合の関節角度の決定方法は前回の通りです。
で軌道を決定する上での残ったパラメータは
●Sinの周期の長さ
●振幅
●&uarr;とロボットのサイズ比
です。
こんかいは
2&pi;:1:???
で???のところを、0.5,0.75,1.5(ロボットの3節を1:2:1とする)
とい...
VIDEO
ヘビ
2015-06-14T21:46:18+09:00
Adel
NINJA BLOG
Adel

 ]]>
]]>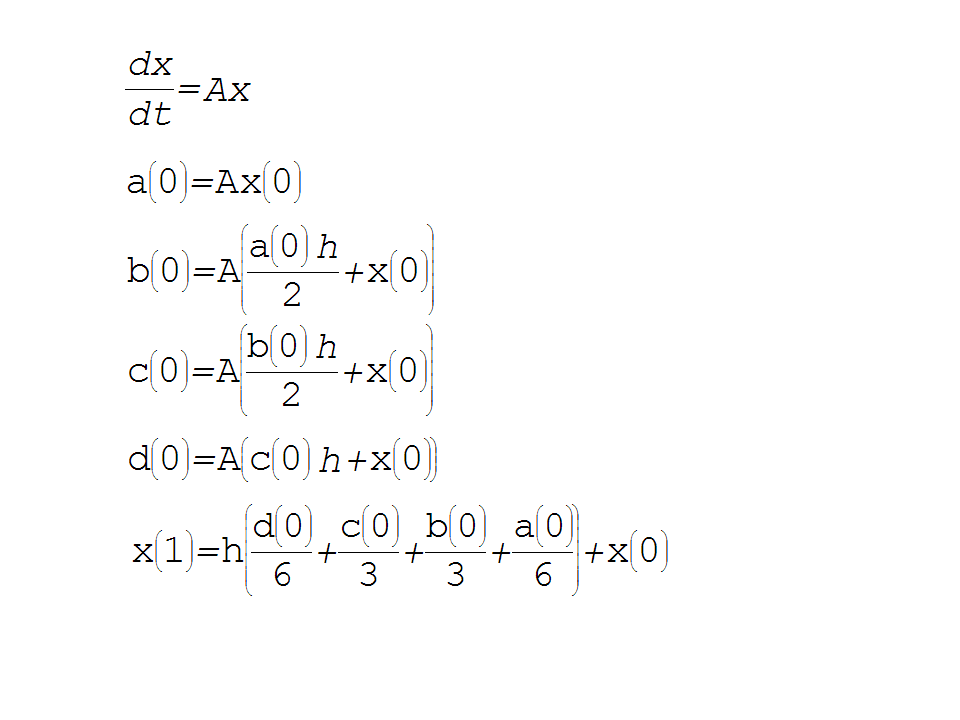 a b c dという4つの係数から、理想的な傾きを求めるようです。
a b c dという4つの係数から、理想的な傾きを求めるようです。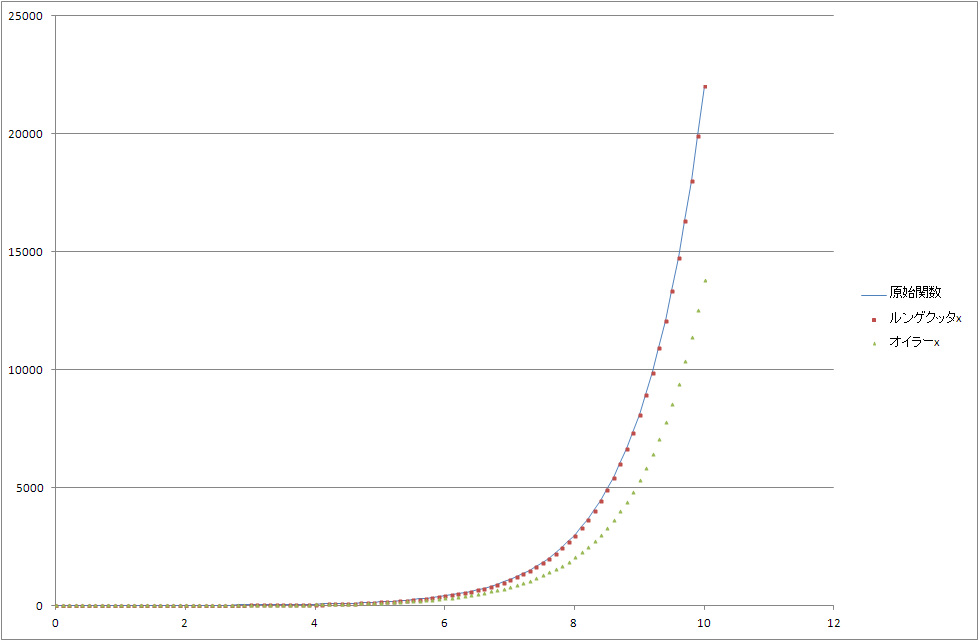
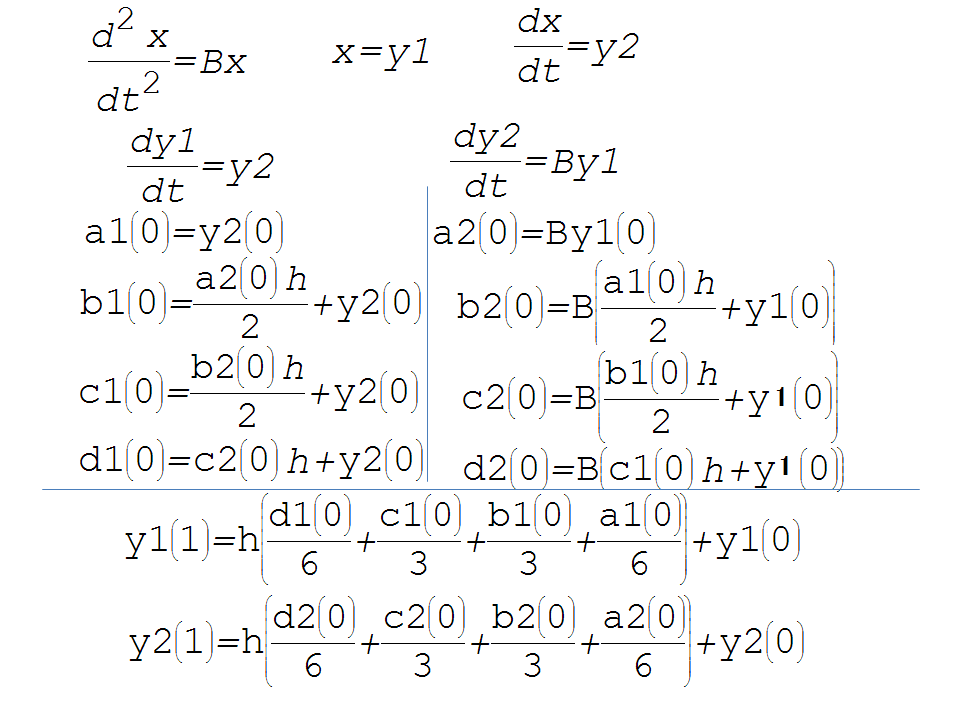
 B=-1だと思いますが。
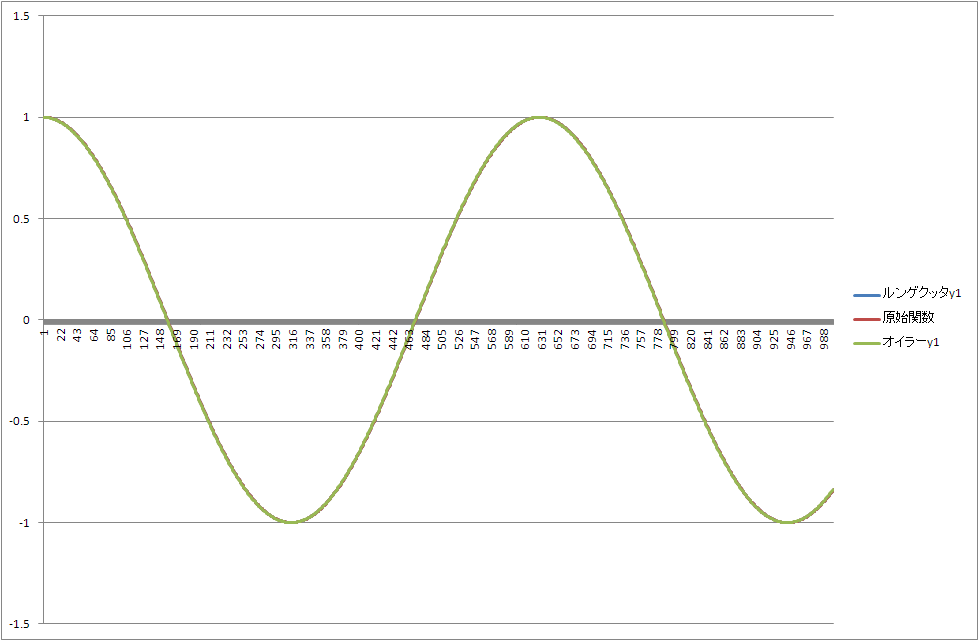
B=-1だと思いますが。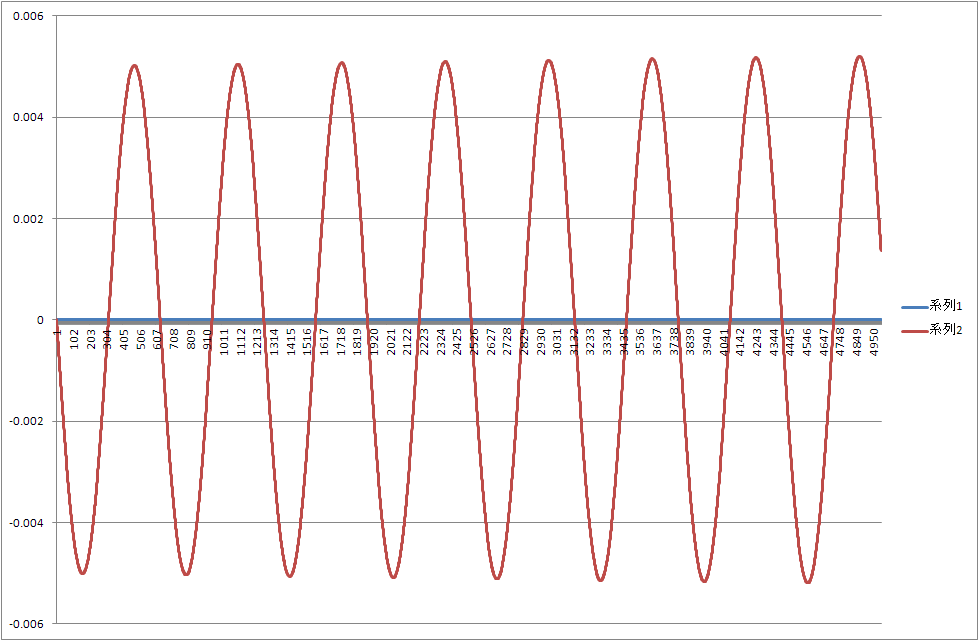 このようになっているので、ルンゲクッタの頑張りようがわかるのではないでしょうか。
このようになっているので、ルンゲクッタの頑張りようがわかるのではないでしょうか。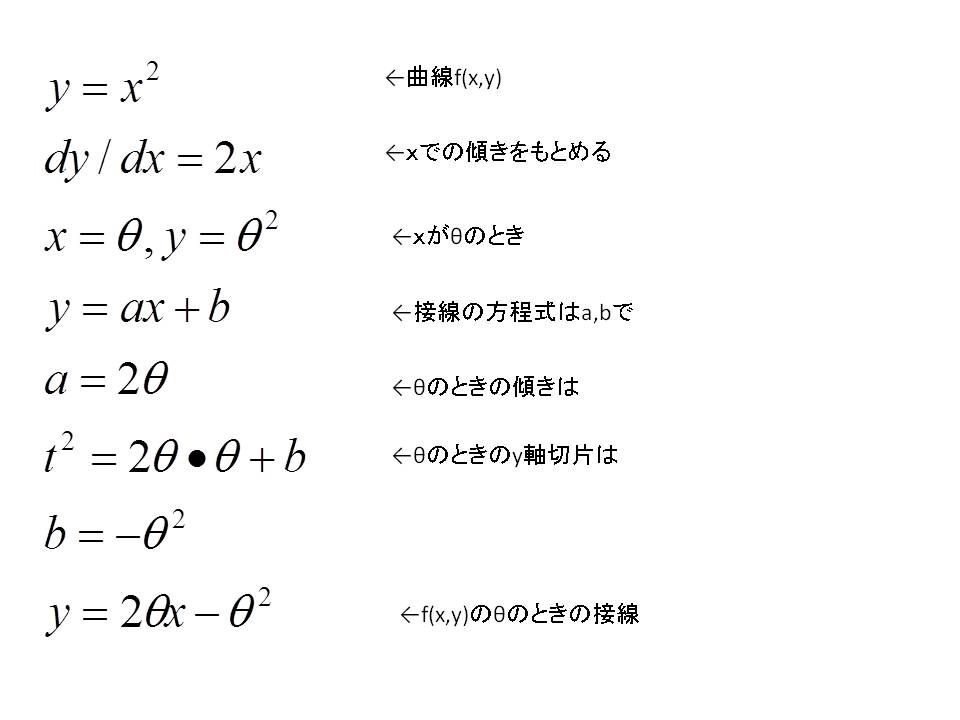 てなかんじで接線の方程式がもとめられますね!
てなかんじで接線の方程式がもとめられますね!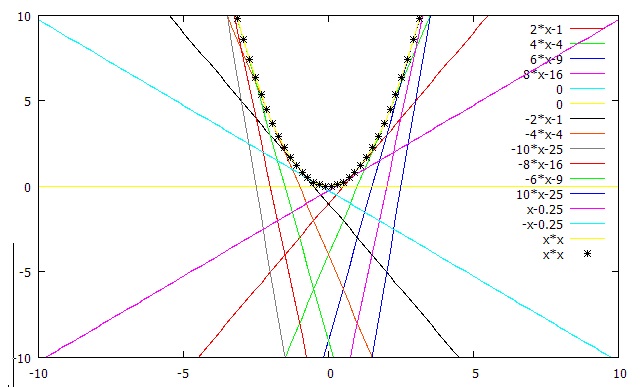
 勝利しましたね。
勝利しましたね。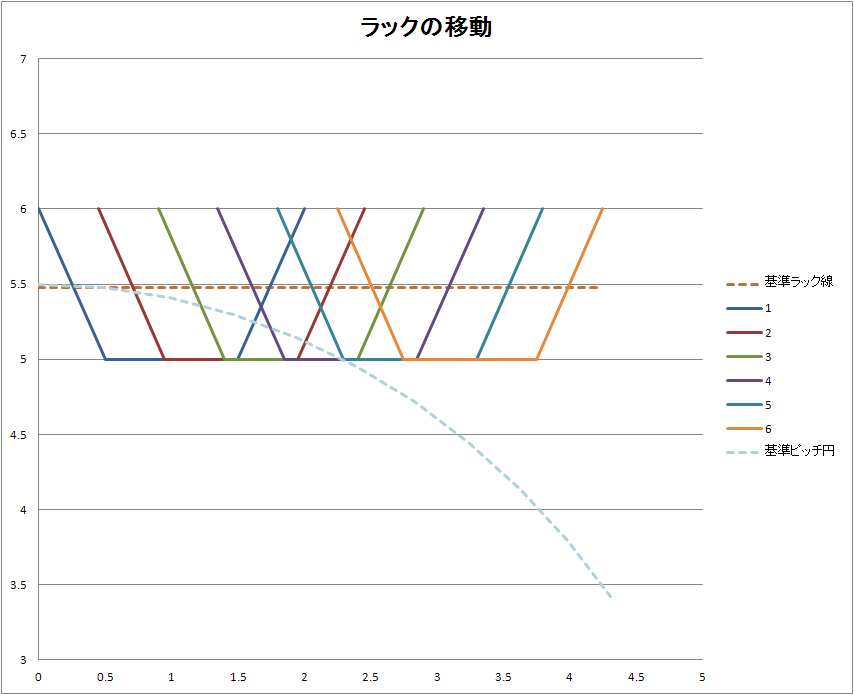 こんな感じです。
こんな感じです。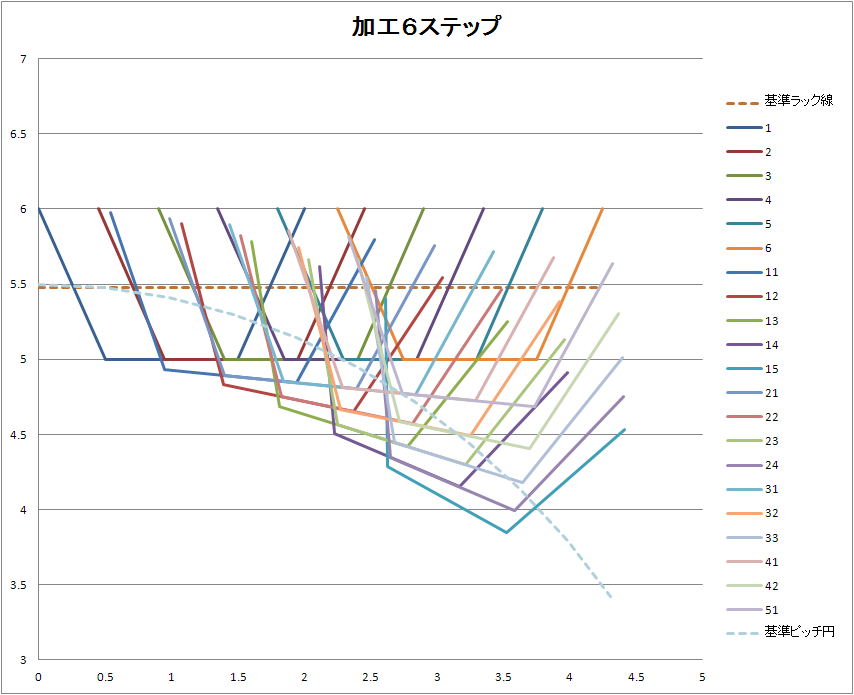 いっぱいになってよくわかりません。
いっぱいになってよくわかりません。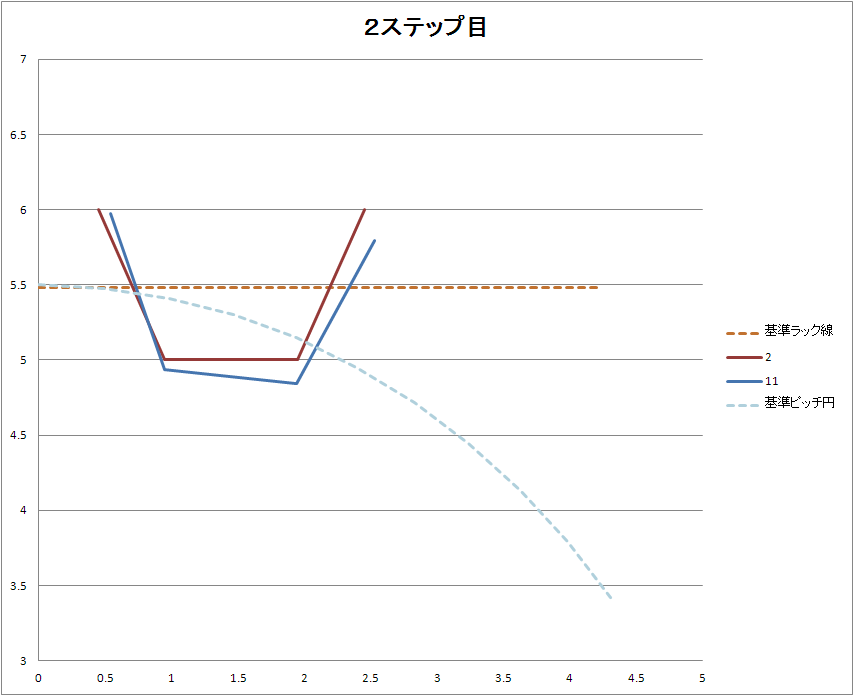 台形の穴に、ちょっとずらしてラックで削る感じですね。
台形の穴に、ちょっとずらしてラックで削る感じですね。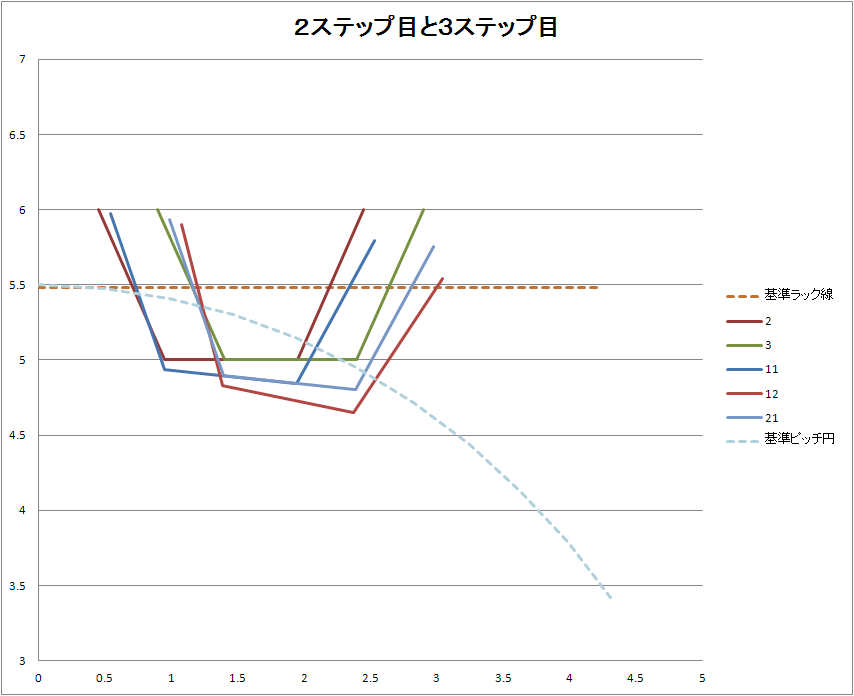 3つの台形を重ねた感じになります。
3つの台形を重ねた感じになります。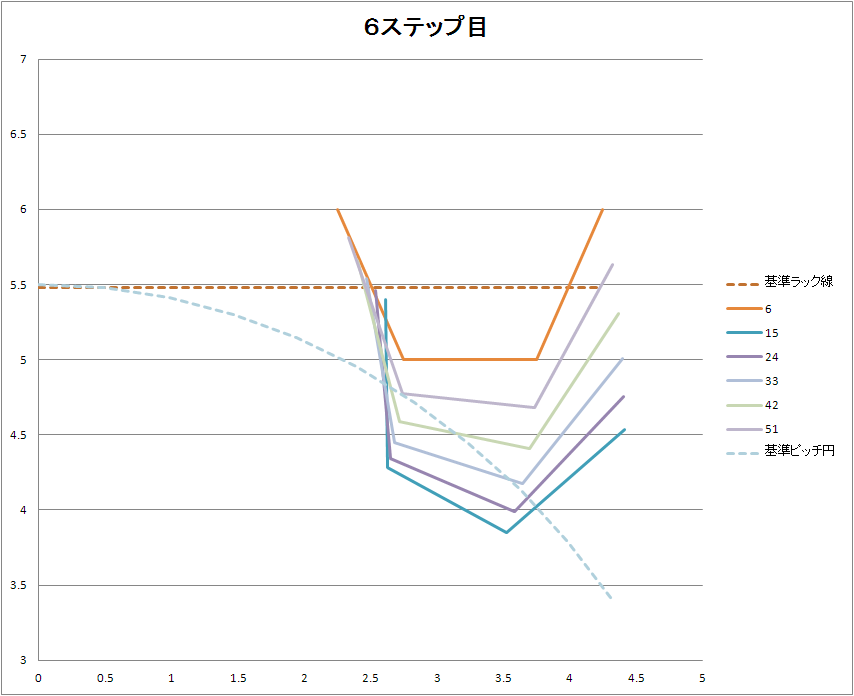 ラックの位置は右方向に6ステップ
ラックの位置は右方向に6ステップ