youtubeを貼るのも慣れました。
そんなわけで、円弧軌道を実現しました。実際は旋回半径300では、実際のレースにおいて不足しています(もっときつく曲がれないと)。
デュティとか位相差とかは前回と同様です。
一歩の周期が倍になっています。
円弧軌道はまあまあ簡単です。
ロボットの中心から右に半径分離れた旋回点を取ります。
そこから最大歩幅の円周角を取ります。
旋回点からそれぞれの足まで距離を取り、それを半径とした円弧を先ほどの円周角分とります。
あとは円弧軌道上を歩かせればいいわけです。
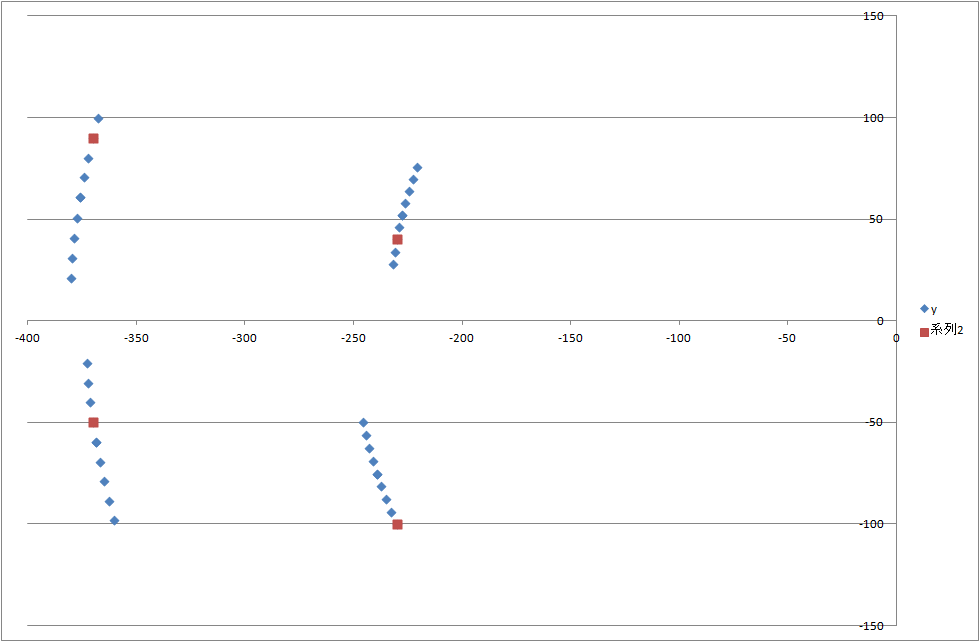
これが今回の軌道です。
なんか絵がデカイな…。気にしない。
SHで計算しても問題ないと思います。
ですが、これ以上軌道が粗くなるのはイヤなのでエクセルで計算した結果をそのままデータテーブルで渡します。
(上の図で言うと、それぞれの点をxyで与えます。あとは速度0でつないで、逆運動学します。)
はてさて、何種類か半径を決めて、データを作ります。そのあとライントレース使用にしないと。
 [0回]
[0回]
PR