軌道上を通った場合の関節角度の決定方法は前回の通りです。
で軌道を決定する上での残ったパラメータは
●Sinの周期の長さ
●振幅
●↑とロボットのサイズ比
です。
こんかいは
2π:1:???
で???のところを、0.5,0.75,1.5(ロボットの3節を1:2:1とする)
というのを試しました。
で、ベターだったのは1.5です。
・・・ちなみに0.75では推進できませんでした。床にごむしーとを敷くと推進できましたが・・・つまり、摩擦が充分であればもっといい感じになるのでしょう。・・・広大なごむしーと・・・ほしぃ。
生成した軌道は
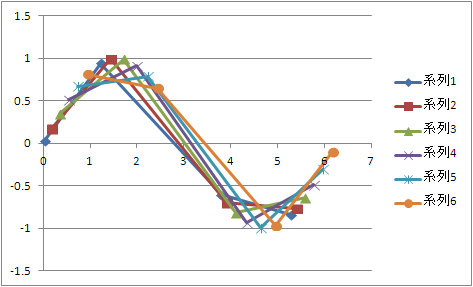
こんな軌道ととおり、
角度としては
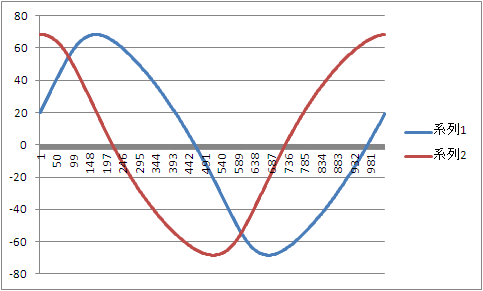
こんな感じになります。
後ろの関節と、前の関節の軌道は違うものでした。
「どっちが前?」というのは綺麗に分かれるようです。
実機の動作は
このようになり、前後というのははっきりしています。
動画からは、
・推進出来る時、出来ない時
・想定した軌道とのズレ
が明確に分かります。
なので、なるべく「推進できる時」というのを1周期ないで多く確保する軌道
というのを推定できると思いますが・・・
ま、あ、そろそろ飽きた・・・か・・・な。
 [0回]
[0回]
PR