で、前回の回路のデバッグをして、ミスっているところを見つけて、なんとか正逆回転にたどり着いたのでした。
問題は、前回の回路における正逆をつかさどるトランジスタ周りでした。
そこを抜粋して、次のような2つの回路にて、実験。

スイッチに関して、プルダウンかアップかが違います。
さて、どうしてこの2種類がチョイスされたのか、
・逆回転の動作ができなかったこと
・手本の回路と違っている点であること
です。

もはや、2sc1815は見当たらなかったので、チップのやつが再び登場。
んでもって、PchNchそれぞれにつながっているトランジスタのエミッタをオシロで見てみることに。
なぜそこを見ようと思ったのか・・・。
プルダウンかアップかによって、結果として変わるのはここだろうと思ったからです。
でプルダウンで、下のスイッチ2パターンで、タクトスイッチを押したとき挙動は
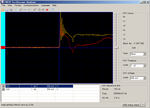
こいつが、プルダウンされてGNDに落ちているときです。
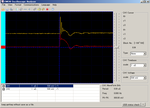
5vにつないだ場合。
プルアップでは
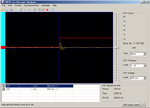
グランドに落ちているとき。
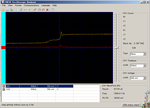
これは、プルアップされているとき。
結果として、プルアップじゃないとだめだな・・・。ということになりますが。
なーんでか?
なーんでか?
なーんでか?
いや、それがわかってるなら、こんなことしてないって。
この結果をもとに、いろいろこの後考えてみます。
まだ、何を考えればいいのかもさっぱりわかっておりませんが・・・。
少しずつ、わからないものを減らしていけばそのうちわかると信じて・・・。
来週は遅延回路についてでも考えます。
=加筆=
・払拭すべき課題
遅延時間を考える基準となるものは、何か?
→FETのディレイタイムと・・・それ以外は
→トランジスタとFETの簡単な回路で計測
遅延は、いつ、なにを、遅延するのか?
どのようにして組み込むか?
→遅延した際に信号の波形は矩形にする
→やはり、シュミットトリガしか思いつかない→しらべる
フリー、ブレーキの決定は何でおきるのか?
フリーを主とする回路は、何が現状の回路と違うのか?
→調べる、即時可能なら作る
→最終敵には、ブレーキはいらずフリーのみでよいと思っている
遅延期間は、ドライバのモード、はどうなるのか?
→回路動作についてタイミングチャートを描く
→→→がんばる
 [0回]
[0回]
PR