このごろは、サイバネティクスという本を読みつつ大学にいったり帰ってきたりする今日この頃です。
朝の喧騒の中、リュックを置いて本を取り出す。立ち、座り、どちらになるかはそのときしだい。どちらにせよ、10分ほどしか読めないので、牛歩のごとく進みます。
まだ、序章といったところです。書かれたのは数学者さんのようです。
学問にはさまざまな分野がありますけど、どれもこれもはじめから全部そろっていたわけではないです。
その時代ごとの文化や政治・宗教の波の中で、「このようなことを研究すれば、社会は豊かになる。」とどなたかが考えて、多くの知恵者がさまざまに議論を重ね1つの研究分野として完成されるわけです。
そこには偉大なる先駆者が居るわけです。ある意味では宗教の開祖みたいなものでしょうか。
と、いうようなドラマが学問の成立には欠かせないです。
私としては、このような単なる知的探究心の満足にとどまらない面白さが、机に向かわせる原動力の大きな部分だと考えています。
けれども、残念なことにその成り立ちにかかわれる人というのはごくわずか、私たち大学生が知っている学問というのは、「AB学」とか「CD理論」といったものを講義で学ぶばかり、これは面白く思う人も居るのかもしれないですけど、学問的な面白さというものはないですね。
講義で得られるものは、専門的な知識とそれ見向かう専門家のものの見方考え方と人の情熱です。
本質的に学問の興味関心とはまた別のものです。
で!
ついに例の回路にPWMをかけてみました。

先に感想を述べると、モータドライバといっても理想的なものに近づけるための現実の努力というのは理想的な状態に比べ、圧倒的に豊富なパラメータを持っているということ。
事実は語る・・・というやつですな。
今回作ったモータドライバは「フリーモードとCWとCCW」がしっかりできることでした。
(ここで言うしっかりというのはよくわからない)
で、周波数とデュティをいじって振る舞いを観察。
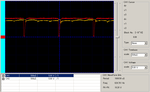
赤い線がPchのゲート、黄色い線がPchのドレイン
モータはファールハーバの2232SR?
まずは周期16msec
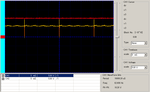
デュティは1/255,7/255,127/255です。
「ふーんこうなるのか」・・・どうなったら、どうなのか という感覚が全然ないのでようわかんない。
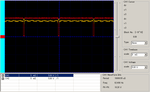
次に1.6msec
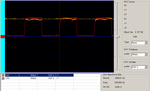
デュティはさっきと一緒。
なんやら、ゲート電圧を持ち直すには時間が掛かるらしい。
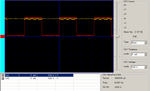
そして0.16msec
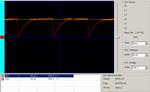
デュティは7/255のみ。
うむ、もはやゲートにか掛かる電圧は~波と名前がつきそうだ。
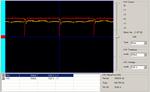
で、モータを見ていた感想としては
周期長い → デュティに比例した回転数の変化がありそう。
周期短い → デュティが5割ぐらいから、ほとんど100%で回っているぽい。
ふむ。制御するなら、周期は長いほうがいいのかなぁ?
周期が長い → モータがバタバタする。
周期が短い → モータが落ち着いてる。
周期は短い方が安定したものになるのかなぁ?
ここでなんか50%なのに100%みたいになってる問題について考察。
ゲート電圧が直に下がらないことが問題なのではないか・・・。その周辺の回路構成に改善すべき点がありそう。
ちなみに、教科書的な搬送周波数はもうさらに10倍ぐらいすべき。
うむ、わからんことばかりだ。
がしかし、しっかりモータを回せる回路を作れたことはとてもうれしい。
今のところ何をどう改善するか方針すら立たないので、このままで大会へいぐ。
もーっとしっかり、FETやらと戯れる時間をサークル時代に持っておけば、いろんな回路構成が取れたんだろうになぁ。
ブレーキモードはいつ使うんだろうね。
制御モデルのPWMのときは、OFFはふりーなのかな、ブレーキなのかな・・・わからなーい。
 [0回]
[0回]