暑い日が続きます。
ですが、大学は積極的に節電しないといけないので作業環境としてはイマイチ。
日曜日は別なので・・・。
今日は遅延回路を試してみた。
まずテキトーに、「モータドライバ製作マニュアル」というマイコンカーの素晴らしい奴にある遅延回路を製作。および計測。
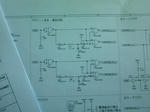
これを
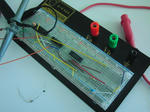
こんな感じ
後は、遅延回路の定数を変えてみる。
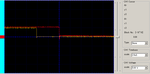
さしあたって、1kと0.01uだと。
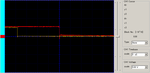
立ち下がりは
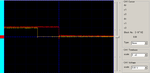
10usecぐらい。いい感じじゃん。
立ち上がりは
11usecぐらい。あれ、なんで立ち上がりの方が遅れるんだ?
シュミットトリガの閾値とかかな。
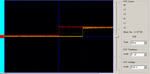
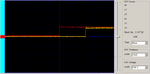
次に、0.01uを並列にもう一個つける。
高校の物理が正しければ、極板面積2倍で容量2倍!
立ち下がりは
19usecぐらい?
まあいっか。
立ち上がりは
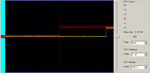
21.5usecぐらい?
上がり下がりの違いが2倍以上に増えた・・・。
指数関数の67%よりも高い閾値であるとすれば、納得できる・・か?
がしかし、時定数はCRで決まってしまうわけだが、目的の時定数があったとしてもCRは一意に決まるわけじゃない。
と、いうことは・・・同じぐらいの時定数でC&Rを替えてみる。
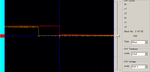
さっきは1kと0.01uだったので100と0.1uにするとどうなるのか?
立ち下がりは
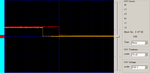
15usecぐらいある。(時間レンジが変わってます)
むう。
立ち上がりは
16usecぐらいかな。
まあこちらが遅くなる理由として、時定数67%よりも上に閾値があるだろうという仮説を覆す結果ではないのだ。
だから、この仮説は結構信じられるものとする。
というわけで、抵抗値が低くなるような設定はよろしくないようだ。
がまだ例は少ないので断定できない。できれば、大きな抵抗値で小さな静電容量を試したいけど、そんなコンデンサは手元にないので・・・。
でもちょっとはやってみた。
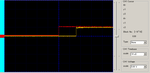
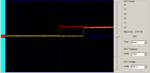
510と0.01、1kと0.01直列
高校物理によれば、極板間の隙間が2倍なので静電容量は半分になる。
前者
立ち下がり
5usecだ・・・。素晴らしい。
立ち上がり
6usecだ・・・。素晴らしい。
例の仮説によれば、時定数は小さくなればなるほど、立ち上がりの方が遅くなってしまう問題は時定数の変化より小さな変化になる。・・・のでこれも正しい。
後者
立ち下がり
5usecよりも少ないのだ。510の10の部分の影響よりも計算上は大きい。
立ち上がり
5.5usecだ。
これは順当だ。
むう。CとRは反比例問題は抵抗を低めにすることで、時定数は計算よりも増えてしまう恐れがある。
なんでか?
抵抗が大きいほうが、電流は増えるだろう。電流が増えれば充電は早くなる。
むう。電流が増えるのがいけないのかなぁ。
むう。目的の抵抗値に対して雑多なものの主張が強くなるからかなぁ。
わからない。けど覚えておこう。
で、例の仮説はどうなのかというと・・・・おかしいなぁ。
データシートのスレッショルドによるとポジティブの方が低い割合になってる。
むう。
わからない。けど覚えておこう。
で!
まいこんかーの回路まんまでは、面白くないので、ブレーキなしでいい感じの回路にしようと設計してみた。

こんな回路。
ブレーキないので、正逆の時の貫通防止に遅延を使うから、こんな感じになった。

動かしたらこうなる!たぶん!
わからない!
来週LTspiceでやってから、作ってみる。
動いたら、これで行きたい。
なんとか7月中に回路の設計はすべて完了したい。
8月はメカ設計して作るだけにしたい。
平凡すぎる毎日にピリオドを打つのはまだまだ先です。
 [0回]
[0回]
PR