さて、今日は日曜日だし体調も優れないので自宅で時間をつぶすわけです。
②すごい昔
ですが、すごい、といっても4年程度昔の話です。
特別調べたわけではないですが、趣味で2足歩行ロボットを始めようと思っている一般の人に目に付きやすく、よく出来たロボットは”robonoba”で間違いないと思います。
Hitecから出され、ロボザックとして普通の本屋さんで購入することが出来ました。
普通の本屋さんから買えた、というのは相当なアドバンテージだったはずです。
TVCMもバンバンやってましたしね。そして、価格。
HSR8498を16個ですから、ちょうど10万円ぐらいです。それに加え、フレームはとてもスタイリッシュでアルマイトもされていますからすごい値段だと思います。
なにより、ロボット用のサーボモータで今までに無い組み立てやすい形状だったのは今でも使いやすいものだ、という印象を与えます。
KHRは普通のラジコンサーボの形状を踏襲していましたし。
まぁ、市場のトーシローがいろいろ書くのはこの辺にしておきましょう。
何より、今でもかなりいいモーションを入れ込むことが出来ると思う、よく出来た設計だったと思います。
といっても、KHR-1と同じ軸配置なんですけども。
という話たちは、ホントに昔の話で僕は良く知りません。
ロボワンの最初の本にいろいろ書いてあると思います。↓
『ROBO-ONEのための二足歩行ロボット製作ガイド』
・・・・・
本当に僕が参加したのは17回大会からですから、普通に戦える2足はみんな旧4000番を使うロボットでした。
/*------------さて足の話--------------*/
ロボワンで活躍するロボットの足は、直交軸と膝ダブルサーボが主流です。
もちろんシングルもまだまだ活躍していました。
足のヨー軸を無視すれば
シングル(ダブル)
付け根⇒ロール⇒ピッチ⇒ピッチ(⇒ピッチ)⇒ピッチ⇒ロール⇒足裏になります。
付け根部分と足裏部分は直行した軸配置になります。
【胴体】
○◇
|
○
○
|
○◇
【足裏】
になります。簡単に作ろうとすれば、膝から上と下はミラーパーツで構成することが出来ます。
直交部分の設計は既にシンプルな手法が4000番に合わせ確立されていましたし、他のサーボに適用することも容易でした。
【画像※今インベンターが開けないので図がない…画像検索してみれば雰囲気つかめるはず。】
■この後は直交軸ダブルサーボについて話を進めます。
片足サーボモータ6個という設計です。
・自由度
ヨー回転が出来ない5自由度です。なので1軸が冗長です。
・シリアルリンクです。少しずつ角度を調整して、モーションを作るのにはとても若い安いリンクです。
・足の長さ
直交軸の利点としてはさほど聞かないのですが、直交軸にすると全足長さのうちのピッチ間長さを長くすることが出来ます。ピッチ間長さを全足長さで割ったものを”ピッチ間率”と呼ぶことにしましょう。
直交軸
【胴体】
○◇
|
○
○
|
○◇
【足裏】全長さを6dとおきましょう。
直交ではない⇒例えばrobonoba
【胴体】
◇
○
|
○
|
○
◇
【足裏】こちらは7dです。
ごらんのとおり、軸数がひとつ多いにもかかわらず直交軸ダブルサーボの方がピッチ間率が高いです。
◇◇◇さて、それではなぜピッチ間率が高い方がよいかという話です。
ロボワンのルールでは、<足裏の大きさ>が<足の長さ>と<全重量>から制限されます。
当然ながら、足裏が大きい方がいいです。もちろん大きいというのは、足裏面積をロボット重心の高さで割ったものが大きいという意味です。これを<大足裏率>と呼びましょう。
動的に制御理論が組まれていないので、安定性の原理は支持多角形から重心から離れにくいことがすべてなわけです。
また足の長さというのは一番上のピッチ軸の位置から足裏までということになっています。ということで元の図の比較をすれば、足全長さが長い方が重心が高くなることをカンタンに表現するために、重心の高さが足全長さであるとしておきましょう。
直交軸ダブルサーボは6d、非直交シングルは7dです。
このときの足裏面積は、ピッチ以下長さで広くなります。
<足裏面積>=<ピッチ以下長さ>※面積なので2乗で効いてくるかと思いますが、もともとオフセット大きさがあることと、ローカルな議論なので比例するとします。
以上のことからピッチ以下長さをピッチ間率にほぼ比例すると考えれば
<ピッチ以下長さ>=~<ピッチ間率>=<ピッチ間長さ>÷<全長さ>
よって
<大足裏率>=<足裏面積>÷<重心高さ>
=<ピッチ以下長さ>÷<重心高さ>
=<ピッチ間長さ>÷<全長さ^2>
というわけで
<直交ダブルの大足裏率>=6/6/6=0.167d
<非直交シングルの大足裏率>=6/7/7=0.124d
したがって
およそ足裏の大きさは直交軸ダブルのほうが1.3倍ほど大きくなります。
・・・・というのはほとんど数の遊び程度のお話です。が!
リンクの長さをサーボの大きさと同じと考慮していることに注意してほしいです。
このときに<リンク長さ>÷<サーボの大きさ>という概念が強く影響します。
これすなわち、マジメに設計すればトルクが大きくなおかつ、ロボの重さが軽ければどんどん長くなりますので、結局のところ<サーボの出力重量比>のようなものです。
また、リンク長さが大きく足れば取るほど、直交軸ダブルの足裏拡大効果は減少します。逆なら拡大されます。
このことをまとめれば、
しょぼいサーボなら、直交軸ダブルが必須であり、
パワフルなサーボなら、直交軸ダブルにこだわる意味は無いわけです。
さらに、高出力なロボットを作ることになれば、
剛性、強度、加工しやすさ、メンテナンス性・・・・・などもろもろの問題から、シンプルである方が結局いいことになります。シンプルであることからは、非直交シングルにずーっと分があります。
以上が軸配置の設計における直交軸ダブルの意味になります。
・モーションは???
次にモーション作成について話しましょう。
ロボワンで勝つために最も重要なのは、安定していて高速で移動できる方法です。
それが、旋回と横移動なわけです。前歩行なんてもってのほかです。
加えて、防御用の低姿勢になることです。
今回はヨー軸は無視していますので、旋回は足裏の影響を強く受けすぎて一般的な議論が出来ませんし、僕自身ヨー軸無しの旋回を試行錯誤したことが無いので良くわかりません。
直交軸にすれば、逆運動学がカンタン!とかいろんなドエライ本に書かれていますが、そんなまともに逆運動学なんてやってません。直接思いついた角度を指令値にして、テキトーなタイミングで再生しているだけです。
なので、直交軸の効果はそこには現れません。
非直交に比べて、多く違うのはピッチ軸を動かしてどれだけ、足を短く出来るか?ということです。
短くするというのは、如何にしゃがめるか?あるいは足裏と重心の距離を如何に短く出来るかです。
これを足裏距離と呼びましょう。
完全にしゃがんだときの足裏距離は
【胴体】
○ー○◇
○ー○◇
【足裏】すなわち2dです。
ところで、シングルのときはどのくらいしゃがめるかは一意ではないです。設計によります。
完全に膝のサーボを折りたたむことは出来ないですから、例えば
【胴体】
(パターン1)
◇
○
。<
○
◇
(パターン2)変な感じだ。
◇
○
○L○
◇
【足裏】こちらは5dあるいは4dです。
すごく解りづらいですが呼び名を付けると、
足裏距離は<防御量>です。
もうひとつ如何に速く短く出来るあるいは長く出来るかというのがあります。
<防御速度>と呼びましょう。
こちらの両方が大きければ、粘り強く戦えるロボットになります。
このことを考えれば、直交軸ダブルなら、<防御量>は2倍近いですし、
ダブルサーボなら、<防御速度>も2倍です。
守ることに関してはかなり有利であるといえると思います。
しかしながら、移動に関してはそうとも言い切れないです。
横移動がメインになるので、簡単にかつ高速に横移動をまっすぐやりたいです。
このとき
・ロール軸は速度を発生
・ピッチ軸は加速度を発生
します。
これすなわち、ロール軸は低減速比がよく、ピッチ軸は高減速比がよい訳です。
また、まっすぐ安定した横移動を実現するためには
・ロールのバックラッシュは小さな影響
・ピッチのバックラッシュは大きな影響
になります。
◇◇◇さて、モーション作成時にそれぞれの軸のバックラッシュおよび不感帯の影響、そして設計上の剛性の低さとクリアランスを考えてみましょう。
カンタンに言えば、如何にフニャフニャしているかということです。
そして、如何に指令値追従しないかということです。このときの姿勢がどうにも思い通りにならない感じを、
姿勢偏差と呼ぶことにしましょう。
そして、サーボの制動によっては全身で振動してしまうこともしばしば。プルプルとかグォングォンとかなります。
移動周期が上手くそのフニャフニャ振動数と合えば、大きな1歩をれんぞくして安定して踏み出せるようになり、高速移動を実現しますが・・・。
まず、ピッチ軸による姿勢偏差です。
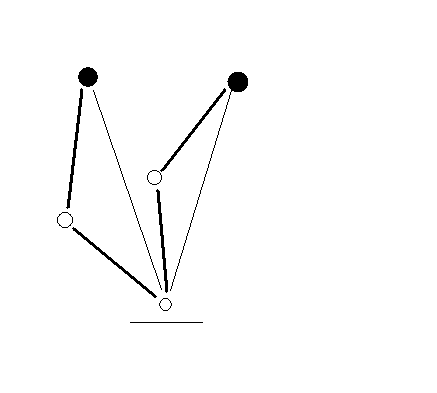
例えば、よこ見て左が前で、右が後ろの絵を考えます。
左に重心がずれれば、
・足首の偏差は、左下
・膝の偏差は右下
になろうとします。
また、ちょっと移動した後もこの傾向は変わりません。
また、右に重心がずれれば、
・足首の偏差は左右どちらかイマイチ解らない。
・膝の偏差は右下
になります。また、ちょっと動いたとすれば、足首の偏差は膝の偏差に引きこまれ
結果右にずれます。
以上のことから、姿勢偏差は後ろに傾き安い傾向になります。
ではロール軸はどうか?
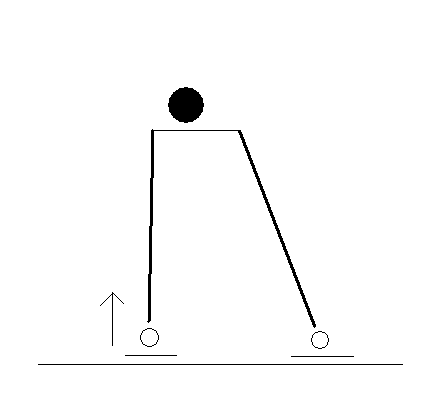
正面から見たとします。
このとき横歩きなので矢印の方向に足が動きます。
そうすると、右足だけ支持している状態になりますが、
そうすると胴体は半時計周りに回転します。
また偏差の影響で左下に移動し始めます。
まあ、移動する方向に姿勢の偏差が出るわけです。
なお、この後矢印の逆方向に左足を動かし着地するのでそのときは左足にほとんど重心が乗ります。
そうすると、バックラッシュの影響で胴体の速度が柔らかくブレーキされます。
バックラッシュにスピードが保管されます(ホントカ?)。
というわけで、ロールのバックラッシュは横移動に適度にあった方がいいと思うわけです。
これが、姿勢偏差の影響になります。◇◇◇
以上をまとめますと、
ロール軸は、力は要らず、バックラッシュの効果があった方がよい。
ピッチ軸は、力が要り、バックラッシュの効果は減らしたい。
ということになります。
したがって、ロール軸は長くして、速度を稼ぎたくなります。
ピッチ軸は短くして、トルクが十分取れるようにしてなおかつ姿勢偏差を減らしたくなります。←これかなり重要。
そうすると、ピッチ間率を減らし非直交シングルあるいは<防御速度>を稼ぐために、非直交ダブルがいいわけです。
この問題は前歩きを進める上で別の見方になりますが。
■というわけで、当時は非直交から直交そしてダブルサーボの流れになりました。
幾何学的な話だけすれば、非直交ダブルはいい作戦だと思われます。
また、重量の問題を考えればサーボがひとつ変わるというのは両足2倍で効いてくるので、だいぶ違います。
この当時はトルクが十分でなければ、非直交シングル
トルクが十分ならば、直交ダブルになったように思われます。
ちなみに、このときのロボワン優勝期待は、重量級軽量級ともに平行リンクを用いた革新的ロボットでした。
最近は当然の如くですが。
では以上のことを踏まえて、僕がどんな設計をしたのかを次回にしようと思います。
だいぶ長くなりました。書いた時間も長いですねぇ。いい暇つぶしです。
 [0回]
[0回]
PR